- Português
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Sensores Tácteis em Robótica: Funções, Tipos, Evolução e Aplicações
Catálogo
Funções Fundamentais Reenquadradas dos Sensores Tácteis
Sensores tácteis são geralmente entendidos por meio de dois papéis intimamente ligados: detecção e reconhecimento. A detecção aborda a primeira camada de informações relacionadas ao toque, enquanto o reconhecimento expande essa informação para uma interpretação estruturada. Juntas, elas definem como um sistema sente o contato, interpreta a interação física e apoia decisões de controle posteriores.
Detecção: A Primeira Camada da Percepção Táctil
A detecção diz respeito à aquisição direta de sinais relacionados ao contato. Neste estágio, o sistema determina se o contato ocorreu e coleta informações físicas mensuráveis daquela interação.
O conteúdo típico da detecção inclui:
• ocorrência do contato
• magnitude da força aplicada
• posição do contato
• comportamento de movimento ou escorregamento
• características relacionadas à superfície, como rigidez, textura e aspereza
À primeira vista, isso pode parecer uma tarefa de sensorização simples. No entanto, em ambientes de engenharia reais, a detecção raramente é tão limpa. Um sensor pode responder rapidamente, mas ainda assim gerar saídas instáveis, e esse tipo de inconsistência muitas vezes cria mais frustração do que uma redução modesta na sensibilidade. O que geralmente conquista confiança na prática não é uma responsividade exagerada, mas um comportamento repetível em condições de contato reais.
A detecção forma a primeira conexão entre a interação física e a interpretação da máquina. Quando um sistema robótico toca um objeto, o passo inicial é converter o contato mecânico em sinais elétricos que podem ser medidos e processados.
Esse processo geralmente inclui:
• sensorização da magnitude da força
• mapeamento da distribuição de pressão
• localização do contato
• rastreamento de eventos dinâmicos
Se o escorregamento começa, espera-se que o sensor registre mudanças sutis relacionadas ao atrito antes que o objeto realmente escape do controle. Se a superfície contatada for irregular, o processo de sensorização deve separar saliências isoladas da textura contínua e distinguir ambos de uma estrutura mais ampla relacionada à dureza. Na implementação real, sistemas que funcionam bem não são apenas aqueles que coletam mais variáveis; são aqueles que capturam as variáveis mais relevantes com um nível de precisão que realmente atende à tarefa.
Na fase de detecção, sensores tácteis geralmente capturam vários tipos de informações físicas:
Estes comumente incluem:
• existência do contato
• força de contato
• localização do contato
• movimento e escorregamento
• propriedades da superfície, como rigidez, conformidade e aspereza
A existência de contacto é o sinal mais básico, mas carrega um valor prático substancial na iniciação de apreensão e respostas relacionadas com a segurança. A força de contacto indica se a interação permanece suave, controlada ou excessiva. A localização do contacto revela como a carga é distribuída pela região sensorial. O movimento e o deslizamento expõem se o objeto permanece seguro ou está começando a mover-se em relação à superfície do sensor. As propriedades da superfície adicionam outra camada de julgamento, oferecendo pistas sobre a condição do material e quão cautelosamente o objeto deve ser manuseado.
Em ambientes aplicados, sinais de deteção brutos raramente aparecem de forma limpa ou completa. Vibrações menores, carregamento desigual, deriva de temperatura e ângulos de contacto em mudança frequentemente distorcem a saída.
Fontes comuns de perturbação de sinal incluem:
• pequenas vibrações mecânicas
• carregamento desigual
• deriva de temperatura
• mudança do ângulo de contacto
Durante a manipulação repetida, mesmo dois contactos aplicados com quase a mesma força podem ainda produzir curvas de resposta ligeiramente diferentes. Esta é uma observação familiar e por vezes frustrante no trabalho tátil, especialmente quando as expectativas laboratoriais enfrentam variabilidade física. Por essa razão, a deteção confiável depende não só da sensibilidade do hardware, mas também da estratégia de calibração e da interpretação consciente do tempo. Em muitos casos, a deteção constante em condições imperfeitas traz mais valor prático do que a sensibilidade ideal demonstrada apenas em experimentos controlados.
Reconhecimento: Interpretação Tátil de Alto Nível
O reconhecimento baseia-se na deteção, transformando sinais táteis brutos em conhecimento significativo sobre o objeto contactado. Nesta fase, o sistema vai além de perguntar o que aconteceu no ponto de contacto e começa a perguntar que tipo de objeto está a ser tocado, que características físicas exibe e que resposta deve seguir.
O reconhecimento pode envolver:
• identificação de forma
• estimativa de tamanho
• avaliação de dureza
• interpretação do padrão de contacto
• análise da estrutura da aresta
• avaliação da condição de empunhadura
Esta transição de medição física para interpretação estruturada permite que a deteção tátil suporte uma manipulação inteligente em vez de apenas relatar eventos de contacto. É também a fase em que o julgamento de engenharia se torna mais visível, uma vez que a interpretação deve permanecer baseada em sinais que muitas vezes são incompletos, ruidosos e dependentes do contexto.
O reconhecimento exige que o sistema organize a informação sensorial em padrões associados a características conhecidas do objeto. Uma ampla área de contacto combinada com baixa pressão local pode indicar um objeto macio ou flexível. Um padrão de força concentrada acompanhado de micro-deslizamento pode indicar uma superfície rígida sob empunhadura insuficiente. Distribuições espaciais repetidas podem ainda revelar bordas, cantos ou geometria curva.
Possíveis pistas de reconhecimento incluem:
• ampla área de contacto com baixa pressão
• força concentrada com micro-deslizamento
• padrões de pressão espacial repetidos
Nesse sentido, o reconhecimento tátil vai além da simples classificação. Reflete uma leitura contextual da interação ao longo do tempo. Os sistemas mais confiáveis tendem a interpretar o toque como um evento em desenvolvimento em vez de como uma única medição congelada, que muitas vezes é uma forma mais honesta de lidar com como o contacto físico realmente se desenrola.
A qualidade do reconhecimento é fortemente moldada pela qualidade da deteção anterior. Se a localização do contacto for imprecisa, a inferência de forma torna-se instável. Se as medições de força variarem, a estimativa de dureza pode tornar-se enganosa.
Limitações comuns a montante incluem:
• localização de contacto imprecisa
• deriva de medição de força
• dados de distribuição de pressão instáveis
• resposta temporal inconsistente
Devido a esta dependência, o reconhecimento é melhor compreendido como o resultado de um pipeline sensorial em camadas, em vez de um passo final isolado. Na prática de desenvolvimento, não é incomum ver o desempenho da classificação parecer impressionante na avaliação em laboratório e depois suavizar durante o manuseio real, onde a orientação do objeto, a velocidade da empunhadura e a contaminação da superfície alteram o próprio sinal. Essa lacuna pode ser decepcionante, mas também oferece um lembrete técnico sóbrio: o desempenho depende não apenas da sofisticação algorítmica, mas também de quão fielmente os dados refletem as condições reais de contacto.
Pipeline de Processamento em Sistemas Tácteis Práticos
Em sistemas táteis práticos, a deteção e o reconhecimento estão ligados através de uma cadeia estruturada de processamento de sinais. O sensor primeiro produz saídas analógicas que refletem a interação mecânica. Essas saídas são depois condicionadas para melhorar a qualidade do sinal e reduzir a distorção. Após a conversão de analógico para digital, a filtragem suprime o ruído enquanto preserva padrões úteis. A extração de características identifica componentes informativos, e algoritmos de classificação ou inferência mapeiam esses componentes para atributos de objetos ou estados de contato.
Uma sequência de processamento típica inclui:
• geração de sinal analógico
• condicionamento de sinal
• conversão de analógico para digital
• filtragem
• extração de características
• classificação ou inferência
Esta sequência pode parecer ordenada no papel, mas cada estágio influencia o que o próximo estágio pode “ver”. Uma vez que informações úteis sejam enfraquecidas ou removidas muito cedo, os algoritmos posteriores têm pouca chance de recuperá-las.
O condicionamento de sinal é utilizado porque as saídas táteis brutas são frequentemente fracas, não lineares ou vulneráveis à interferência.
Operações comuns de condicionamento incluem:
• amplificação
• adaptação de impedância
• correção de base
Essas operações preparam o sinal para análises posteriores. A conversão de analógico para digital determina então quão fielmente o evento contínuo de toque é capturado em forma digital. Se a amostragem for muito lenta, variações relacionadas ao deslizamento podem passar despercebidas. Se a quantização for muito grosseira, diferenças sutis relacionadas à textura podem desaparecer. Um bom design de sistema, portanto, depende do alinhamento dos parâmetros de processamento eletrônico com o comportamento mecânico observado, o que muitas vezes requer mais contenção e ajuste do que os designs de primeira linha costumam antecipar.
A filtragem faz mais do que remover ruído indesejado; ela molda diretamente os limites perceptuais do sistema. Filtragens excessivas podem apagar padrões transitórios associados ao deslizamento inicial ou ao contato texturizado. Filtragens insuficientes podem permitir que ruídos se façam passar por um evento significativo.
Exemplos típicos de características incluem:
• deslocamento do centróide de pressão
• inclinação força-tempo
• variância local
• assinatura no domínio da frequência
A mesma tensão aparece na extração de características. Características eficazes preservam a relevância física enquanto reduzem a complexidade desnecessária. Em sistemas em funcionamento, características interpretáveis geralmente se mostram especialmente úteis, pois permitem que engenheiros rastreiem casos de falha, refinem o comportamento de controle e evitem a situação desconfortável em que um modelo produz respostas que parecem precisas, mas continuam difíceis de explicar.
Uma vez que as características são extraídas, algoritmos de classificação atribuem significado ao evento de contato.
Esses algoritmos podem ser usados para:
• distinguir categorias de objetos
• estimar classe de material
• detectar aperto estável versus deslizamento
• identificar padrões de contato recorrentes
No entanto, a classificação não deve ser tratada como um concurso restrito de precisão de referência. Um modelo com precisão medida ligeiramente inferior pode ter um desempenho melhor durante a implementação se generalizar de forma mais confiável e responder de maneira mais previsível sob deriva do sensor ou variação ambiental. Do ponto de vista do sistema, uma inteligência tátil confiável é muitas vezes construída através do tratamento disciplinado da incerteza, em vez de um ajuste agressivo a conjuntos de dados idealizados.
Relação Entre Deteção e Reconhecimento
A deteção e o reconhecimento são frequentemente descritos como funções separadas, mas na prática permanecem profundamente interdependentes. A deteção fornece a estrutura mensurável do toque, enquanto o reconhecimento dá a essa estrutura um significado operacional. Se a deteção carece de precisão, o reconhecimento torna-se frágil. Se o reconhecimento está ausente, a deteção permanece descritiva sem oferecer direção suficiente para a ação. Por essa razão, sistemas táteis eficazes são geralmente projetados com hardware de sensoriamento, processamento de sinal e lógica de decisão em alinhamento deliberado com a tarefa de manipulação pretendida.
Durante o agarre robótico, a deteção pode primeiro confirmar o contato e medir a distribuição de força. O reconhecimento então interpreta se o objeto é macio, rígido, deslizante, centralizado ou desalinhado.
Esta interpretação pode orientar:
• ajuste de agarrar
• planejamento de movimento
• resposta de segurança
Dentro deste ambiente de feedback fechado, a sensoriamento tátil serve como parte da lógica de controle ativo em vez de como um canal de medição passiva. Portanto, os sistemas mais robustos são frequentemente orientados para a tarefa. Eles não tentam perceber cada variável com a mesma ênfase. Em vez disso, eles se concentram nas informações que mais diretamente sustentam ações estáveis, informadas e tecnicamente defensáveis.
Compreensão Mais Ampla de Seus Principais Papéis
Os papéis principais dos sensores táteis vão muito além da simples detecção de toque. A um nível mais profundo, eles suportam uma compreensão física estruturada através de sensoriamento em camadas, processamento de sinais e interpretação. A detecção captura os fatos observáveis de contato. O reconhecimento explica o que esses fatos sugerem sobre o objeto e a interação. Entre essas duas camadas reside o desafio mais amplo da inteligência tátil: reter informações fisicamente úteis enquanto as converte em conhecimento acionável. Um sistema tátil bem projetado se destaca não porque produz mais dados, mas porque converte contato em julgamento sólido com velocidade, precisão e confiabilidade suficientes para suportar a interação no mundo real.
Evolução dos Sensores Táteis e Expansão Técnica

Sensores Táteis na Década de 1970
A pesquisa sobre sensores táteis avançou lentamente durante a década de 1970, quando os sistemas robóticos foram projetados principalmente para determinar se havia ocorrido contato e estimar a magnitude da força aplicada. A maioria dos sistemas táteis daquela época se concentrava em responder a essas duas questões básicas. Essa limitação refletia o estado mais amplo da tecnologia robótica na época. As arquiteturas de controle eram relativamente simples, os recursos de computação eram restritos e a integração mecânica frequentemente apresentava desafios maiores do que os próprios elementos sensoriais.
Como resultado, os primeiros sensores táteis geralmente apresentavam baixa resolução espacial, sensibilidade limitada, curta vida útil e desempenho instável sob condições de carga repetida. Embora esses dispositivos pudessem suportar operações básicas relacionadas ao contato, raramente forneciam a consistência necessária para tarefas de manipulação delicada ou operação em ambientes incertos. Muitos experimentos de engenharia inicial revelaram que o desafio ia além da detecção de pressão. Os engenheiros também tinham que manter a qualidade do sinal confiável, apesar da deformação repetida, flutuações de temperatura e desgaste da superfície. Essa experiência estabeleceu um princípio importante que continua a influenciar o desenvolvimento de sensores táteis hoje: a sensibilidade tátil útil requer progresso simultâneo na qualidade do sinal, conformidade mecânica e robustez do sistema. Ao longo da história do campo, esse equilíbrio frequentemente distinguiu sistemas práticos bem-sucedidos de protótipos laboratoriais promissores.
Tecnologias de Sensing na Década de 1980
Durante a década de 1980, a pesquisa sobre sensores táteis entrou em um período de desenvolvimento muito mais rápido. Os pesquisadores ampliaram seu trabalho além de dispositivos de princípio único e começaram a investigar uma gama mais ampla de tecnologias de sensoriamento, incluindo resistivas, capacitivas, piezoelétricas, ópticas, ultrassônicas, térmicas e magnéticas. Essa diversificação ocorreu porque cada mecanismo de sensoriamento ofereceu vantagens únicas, ao mesmo tempo que introduziu suas próprias limitações. Os engenheiros frequentemente precisavam equilibrar requisitos concorrentes envolvendo sensibilidade, largura de banda, flexibilidade estrutural, imunidade ao ruído, complexidade de fabricação e custo.
Sensores táteis resistivos eram geralmente simples de fabricar e integrar em sistemas maiores, mas a deriva a longo prazo poderia reduzir a confiabilidade das medições. Sensores capacitivos ofereciam alta sensibilidade e baixo consumo de energia, embora exigissem um escudo cuidadoso e circuitos de suporte eletrônico estáveis. Sensores piezoelétricos respondiam de forma eficaz a forças variáveis, mas eram menos adequados para medir cargas estáticas. Sensores táteis ópticos forneciam alta resolução e forte resistência à interferência eletromagnética, mas frequentemente exigiam estruturas de embalagem mais complicadas. À medida que a pesquisa avançava, tornava-se cada vez mais claro que nenhum princípio de sensoriamento único poderia satisfazer todas as aplicações. As estratégias de design prático, portanto, mudaram-se para a seleção de tecnologias de sensoriamento com base nos requisitos da tarefa, em vez de buscar uma solução universal.
Processamento de Dados Táteis e Exploração Ativa
A década de 1980 também viu progressos significativos no processamento de dados táteis e na exploração tátil ativa. Esse desenvolvimento representou uma mudança importante na forma como os pesquisadores avaliavam o desempenho do sensoriamento tátil. A eficácia de um sistema tátil não era mais determinada apenas pelas propriedades do material ou pelo design do transdutor. O desempenho dependia cada vez mais de como as informações táteis eram processadas e interpretadas durante a interação com o ambiente.
A automação industrial desempenhou um papel importante na condução dessa transição. Esperava-se que os robôs detectassem deslizamentos, estimassem condições de contato, identificassem características da superfície e ajustassem a força de agarre em tempo real. Por meio da implementação prática, os pesquisadores descobriram repetidamente que os sinais táteis brutos continham significado limitado por si só. Informações valiosas surgiram somente após calibração, filtragem, extração de características e análise específica de tarefas. Consequentemente, a história da sensação tátil tornou-se não apenas uma história de hardware aprimorado, mas também uma história de transformação de medições de contato em informações de controle acionáveis.
Imagem Táctil e Percepção Integrada nos Anos 1990
Nos anos 1990, a pesquisa em sensores táteis tornou-se mais ampla, mais sistemática e cada vez mais interdisciplinar. A atenção mudou dos elementos de sensoriamento individuais para estruturas de sensoriamento completas que incorporavam arquiteturas de sensores, imagem tátil, reconhecimento de formas, percepção ativa e sistemas robóticos integrados. Durante esse período, a sensação tátil também amadureceu conceitualmente. Em vez de ser vista como um componente auxiliar adicionado perto do final do desenvolvimento do sistema, a sensação tátil começou a ser reconhecida como um canal de percepção independente com suas próprias características espaciais, dinâmicas temporais e importância funcional.
A imagem tátil permitiu que informações de contato distribuídas fossem representadas de uma forma semelhante a dados visuais. Essa capacidade abriu novas oportunidades para reconhecimento de padrões e caracterização de objetos. A pesquisa em reconhecimento de formas demonstrou ainda mais que a informação tátil poderia revelar detalhes que os sistemas visuais muitas vezes lutavam para obter. Essas vantagens tornaram-se particularmente evidentes quando os objetos estavam ocluídos, deformáveis, refletivos, submersos ou localizados em ambientes confinados. A experiência prática mostrou consistentemente que, quando a informação visual se torna pouco confiável, a informação tátil muitas vezes se torna mais valiosa. Como resultado, a sensação tátil passou gradualmente de um papel de apoio para uma posição mais central na manipulação e percepção robótica.
Aplicações Médicas de Sensores Táteis no Início dos Anos 2000
O início dos anos 2000 introduziu outra grande transição à medida que a sensação tátil se expandiu para aplicações médicas e de campo. Essa mudança refletiu tanto melhorias tecnológicas quanto um reconhecimento crescente da importância do feedback tátil em ambientes operacionais exigentes.
Em 2002, sensores táteis foram integrados a cateteres usados para cirurgia endoscópica para estimar a rigidez do tecido e reduzir o risco de aplicação de força excessiva. Esse desenvolvimento foi particularmente significativo porque procedimentos minimamente invasivos limitam o feedback tátil direto e exigem que os cirurgiões se baseiem fortemente em informações indiretas. Mesmo a restauração parcial da sensação tátil melhorou a segurança e a precisão do procedimento.
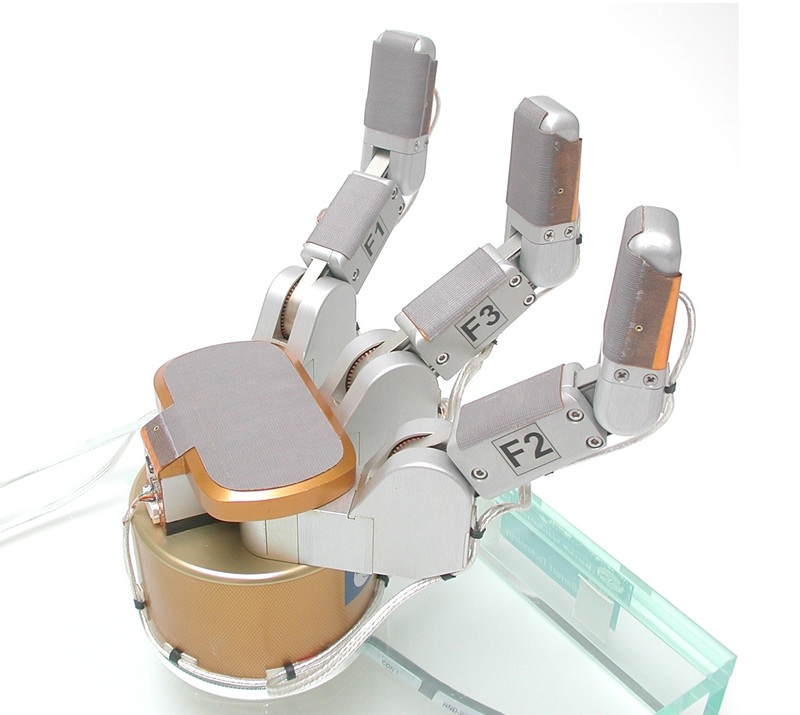
Em 2003, uma equipe de pesquisa japonesa desenvolveu um sensor tátil piezoelétrico tridimensional para um dedo robótico e o aplicou a uma interface de simulação de fígado usada em treinamento cirúrgico minimamente invasivo. Este trabalho demonstrou que a sensação tátil poderia apoiar não apenas a manipulação direta, mas também simulação, treinamento e desenvolvimento de habilidades. Interfaces táteis bem projetadas ajudaram os usuários a distinguir variações sutis de força e reduziram o tempo necessário para se adaptar a procedimentos complexos.
Sensação Tátil para Robótica Subaquática e de Campo
Em 2009, pesquisadores alemães implementaram um sistema de sensação tátil em um robô subaquático inspirado em polvos, permitindo uma detecção de obstáculos mais autônoma e exploração do fundo do mar. Este projeto ilustrou o valor estratégico da sensação tátil em ambientes onde a visibilidade é limitada, as condições de iluminação são precárias ou a qualidade da água interfere nos sistemas ópticos. Em tais situações, o toque pode tornar-se uma das fontes mais confiáveis de informação ambiental.
Da Detecção de Contato à Percepção Inteligente
Considerado como um todo, o desenvolvimento da sensação tátil demonstra um progresso claro da detecção básica de força em direção a sistemas de percepção sofisticados capazes de suportar controle em malha fechada em ambientes complexos. O significado mais profundo dessa evolução reside não apenas na expansão das aplicações, mas também nas expectativas em mudança colocadas sobre as tecnologias de sensação tátil.
A deteção táctil evoluiu de um detector de contacto passivo para uma interface ativa entre máquinas e o seu ambiente. Os avanços mais significativos ocorreram quando os investigadores reconheceram o toque como um canal de percepção único em vez de meramente um substituto para a visão. A informação tátil pode revelar propriedades como rigidez, textura, deslizamento, geometria local e intenção de interação. Olhando para o futuro, o progresso futuro dependerá provavelmente menos de melhorias isoladas na sensibilidade e mais da integração de materiais avançados, design mecânico, interpretação de sinais e estratégias de controlo dentro de estruturas de deteção unificadas. A história do campo já demonstrou o valor de sensores melhores. Igualmente importante, no entanto, é a crescente compreensão de que a interpretação melhorada da interação muitas vezes tem um impacto ainda maior no desempenho do sistema.
Classificação de Sensores Tácteis
Os sensores tácteis podem ser interpretados a partir de perspectivas amplas e estreitas.
No sentido amplo, envolvem a perceção de toque, pressão, força, deslizamento, temperatura, textura da superfície e vibração.
No sentido estreito, concentram-se na interação mecânica formada na interface de contacto entre um sistema robótico e um objeto externo.
De um ponto de vista de engenharia, a visão mais estreita é frequentemente mais direta porque alinha os alvos de medição com a apreensão, manipulação, regulação de contacto e controlo de movimento. Esta distinção pode parecer subestimada à primeira vista, no entanto, frequentemente limpa a confusão conceptual e ajuda as discussões de design a manterem-se focadas em comportamentos mensuráveis.
Um caminho de classificação mais utilizável vai além da função sozinha e também considera o princípio físico que converte eventos de contacto em sinais mensuráveis.
Os grupos funcionais comuns incluem sensores de contacto, sensores de força-momento, sensores de pressão e sensores de deslizamento.
Estes grupos continuam a ser informativos, mas os seus limites frequentemente se confundem na implementação real. Uma unidade de deteção pode responder à força normal, força tangencial e deslizamento inicial dentro da mesma interação. Por essa razão, a classificação por método de transdução frequentemente fornece uma estrutura técnica mais limpa. Ela clarifica não apenas o que um sensor detecta, mas também como se comporta sob ruído, carga sustentada, limites de embalagem, pressão de calibração e restrições de integração a nível de sistema. No trabalho de engenharia real, esta segunda camada de classificação frequentemente resolve debates que rótulos puramente funcionais deixam sem resposta.
Perspectiva Funcional dos Sensores Tácteis
De uma perspectiva funcional, os sensores tácteis são geralmente agrupados pela quantidade física ou evento que se espera capturar.
Sensores de Contacto
Sensores de contacto determinam se ocorreu contacto físico entre uma superfície sensível e um objeto. A sua saída pode ser binária ou baseada em limiares, no entanto, esse feedback aparentemente modesto muitas vezes define o tom para toda a sequência de interação. Na apreensão robótica, um simples sinal de contacto pode limitar a força de fechamento excessiva, reduzir danos relacionados à colisão e suportar lógica de controlo acionada por eventos. Muitos sistemas operacionais começam com uma deteção de contacto fiável antes de passar para uma estimativa de força mais elaborada.
A implementação prática revela repetidamente a mesma lição: quando o primeiro contacto é detectado muito tarde, ou quando o sinal chega com muito ruído, o controlo a jusante torna-se mais difícil de determinar. Os engenheiros tendem a sentir rapidamente esse problema, porque mesmo um controlador bem calibrado perde a compostura quando a primeira pista física é vaga.
Sensores de Força-Momento
Sensores de força-momento medem forças e torques que atuam na interface de contacto. Eles servem em situações em que um sistema deve fazer mais do que simplesmente confirmar o contacto; deve também interpretar direção, magnitude e efeito rotacional. Essa capacidade apoia manipulação habilidosa, montagem conformável e uso de ferramentas.
A sua contribuição reside em ajudar um robô a ajustar a postura, a aderência e o movimento quando as cargas mudam de forma sutil. Na prática, a precisão da força sozinha raramente conta toda a história.
Transformação de coordenadas estável, baixo acoplamento cruzado, montagem repetível.
Estes fatores frequentemente moldam o desempenho geral com igual força. Designers experientes geralmente aprendem isso com alguma frustração, porque especificações elegantes de sensores podem perder grande parte do seu apelo assim que a inconsistência na montagem começa a distorcer os dados.
Sensores de Pressão
Sensores de pressão capturam a distribuição espacial de carga normal através de uma área de contacto. Isso torna-os bem adequados para matrizes táteis, pele artificial, avaliação de agarramento e estimativa de forma do objeto. O mapeamento de pressão fornece mais do que uma magnitude de força líquida.
• Mostra onde a carga está concentrada.
• Mostra como a carga muda ao longo do tempo.
• Mostra se o padrão de contacto atual sugere uma manutenção estável ou sobrecarga local.
Em muitas tarefas de manipulação, a informação de pressão distribuída diz mais do que um único valor de força resultante, porque o contacto real raramente ocorre num único ponto idealizado. Essa é uma das razões pelas quais matrizes de pressão densas continuam a atrair atenção, mesmo quando as exigências de fiação e processamento de sinal testam a paciência da equipa de design.
Sensores de Deslizamento
Sensores de deslizamento detectam movimento relativo, ou o início do movimento, entre a superfície de contacto e um objeto. O seu papel torna-se especialmente significativo porque uma apreensão bem-sucedida depende não apenas da aplicação de força, mas também de notar quando essa força já não é suficiente. A deteção precoce de deslizamento dá ao sistema de controlo uma oportunidade de aumentar a aderência antes que a perda total do objeto ocorra.
Em configurações práticas, os sinais de deslizamento mais úteis são frequentemente aqueles que expõem micro-movimento pouco antes da falha visível. Sinais que meramente confirmam deslizamento depois que este é óbvio são muito menos úteis. Esse breve período de transição carrega um peso incomum na manipulação, e muitos engenheiros desenvolvem um respeito saudável por ele depois de verem apreensões promissoras falharem em frações de segundo.
Classificação por Método de Transdução
A classificação funcional descreve o objetivo de detecção, enquanto a classificação baseada em transdução explica o mecanismo interno que gera o sinal. Para decisões de design, esta abordagem é muitas vezes mais reveladora porque influencia diretamente a sensibilidade, linearidade, robustez, custo, fabricabilidade e compatibilidade com hardware robótico. Também oferece uma imagem mais franca do que um sensor exigirá após a fase do protótipo, quando o otimismo geralmente encontra a disciplina da integração.
Sensores Tácteis Piezorresistivos
Sensores piezorresistivos operam mudando a resistência elétrica sob carga mecânica aplicada. Eles são amplamente utilizados porque o princípio é direto, a eletrónica é comparativamente simples e o custo pode permanecer modesto. Eles também se adaptam bem à integração em matrizes, o que os torna atraentes para peles tácteis de grande área e superfícies de mapeamento de pressão.
O seu apelo mais forte reside na praticidade. Eles são relativamente fáceis de fabricar, interligar e escalar em muitas aplicações. Essa conveniência explica por que eles aparecem com tanta frequência em protótipos e conceitos comerciais. Ao mesmo tempo, as suas desvantagens não podem ser ignoradas.
Deriva da resistência, histerese, sensibilidade à temperatura, fadiga de material a longo prazo.
Esses efeitos podem reduzir a confiabilidade da medição. Sob carga repetida, o sinal pode desviar mesmo quando a força aplicada não muda. Isso é mais do que um incômodo teórico menor; frequentemente cria encargos de calibração e torna o controle de força em malha fechada menos previsível ao longo do tempo.
A experiência de implementação tende a apontar na mesma direção: sensores piezorresistivos têm um desempenho melhor quando o design reconhece suas imperfeições desde o início.
Seleção de material, estratégia de compensação, rotina de recalibração.
Essas escolhas de design geralmente importam mais do que as características estáticas idealizadas no papel. Essa conclusão não é glamorosa, mas muitas vezes é onde o julgamento de engenharia durável começa.
Sensores Tácteis Ópticos
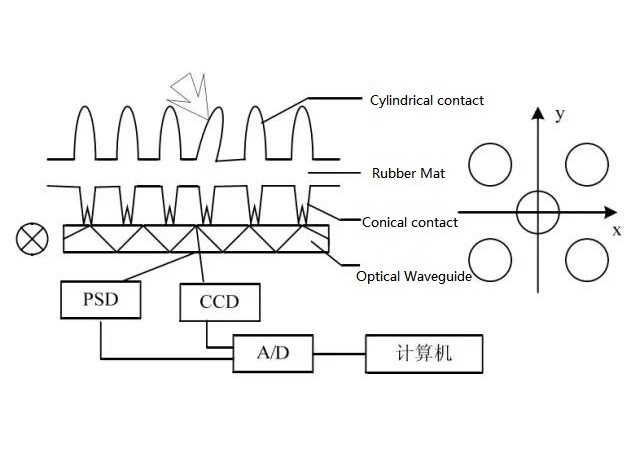
Sensores tácteis ópticos detectam deformação medindo mudanças na intensidade da luz, caminho da luz, reflexão, refração ou características da imagem dentro da estrutura de detecção. Porque o princípio de detecção é separado da leitura direta de deformação elétrica, esses sensores podem oferecer uma forte imunidade a interferências eletromagnéticas e podem fornecer informações espaciais ricas.
A sua vantagem mais impressionante é a densidade de informação. Métodos ópticos podem capturar geometria de contacto detalhada, campos de deformação e, em alguns designs, padrões relacionados ao cisalhamento. Isso os torna altamente valiosos para reconhecimento de objetos, caracterização de superfícies e manipulação precisa. Em sistemas avançados, a detecção tátil óptica pode funcionar quase como imagem de camada de contato, dando aos engenheiros um nível de detalhe que é difícil de desconsiderar uma vez que o tenham visto funcionar bem.
O compromisso reside na complexidade estrutural.
Embalagem cuidadosa, iluminação controlada, alinhamento preciso, processamento de imagem ou sinal não trivial.
Essas exigências não são incidentais. O desempenho pode cair quando o caminho óptico interno muda, quando o elastômero envelhece, ou quando contaminantes alteram o comportamento refletivo. Em uso real, um conceito que parece elegante no laboratório pode tornar-se teimosamente difícil como produto, em grande parte porque a robustez mecânica e a consistência óptica são mais difíceis de preservar do que o esperado. Por essa razão, a detecção tátil óptica tende a ser mais persuasiva quando a percepção rica realmente compensa o encargo adicional do sistema.
Sensores Tácteis Capacitivos
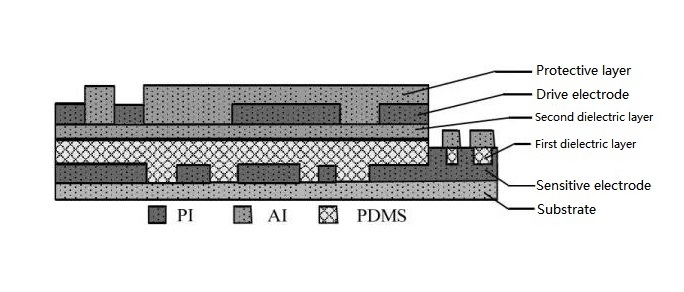
Sensores tácteis capacitivos medem força ou pressão através de mudanças na capacitância causadas pelo deslocamento dos eletrodos, variação da área de contato ou deformação dielétrica. Eles são conhecidos por sua alta sensibilidade, baixo consumo de energia e forte capacidade de resposta. Para medições tácteis refinadas, muitas vezes são vistos com considerável otimismo.
Uma grande vantagem da detecção capacitiva é que pequenas mudanças estruturais podem produzir respostas elétricas mensuráveis. Isso apoia a detecção de toque leve e variação sutil de pressão, que é altamente útil em interações conformes e em pegadas delicadas. Estruturas capacitivas também podem ser feitas finas e flexíveis, tornando-as bem adequadas para superfícies de detecção distribuídas.
Ao mesmo tempo, esses sensores são vulneráveis a várias perturbações.
Capacitância parasita, ruído ambiental, efeitos da umidade, interferência eletromagnética.
Esses fatores podem introduzir instabilidade ou variação falsa, especialmente em matrizes densas e montagens robóticas compactas onde as linhas de sinal estão densamente empilhadas. Na prática, o desempenho utilizável é frequentemente decidido pela disciplina de implementação, em vez de apenas pela teoria.
Blindagem, aterramento, layout do circuito, arquitetura de leitura.
Esses aspectos determinam frequentemente se a sensibilidade esperada se transforma em dados confiáveis. Muitas equipes descobrem que a detecção capacitiva parece enganosamente simples ao nível do princípio, mas se torna muito mais exigente durante a integração.
Sensores Tácteis Magnético Condutivos
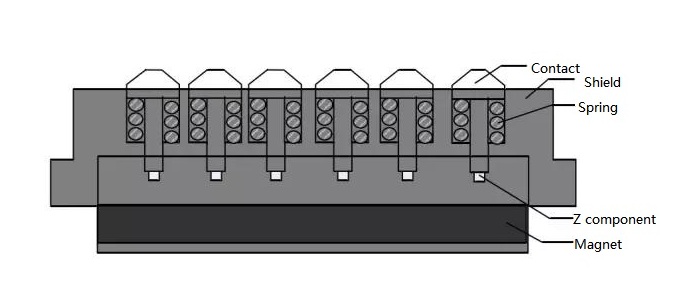
Sensores tácteis magnético condutivos convertem mudanças induzidas por força na distribuição do campo magnético em saída elétrica. Suas estruturas frequentemente combinam um meio deformável, elementos magnéticos e componentes sensíveis ao campo, como dispositivos Hall ou elementos magnetorresistivos. Este método pode apoiar designs compactos, sensibilidade prática e, em alguns casos, boa tolerância ao desgaste mecânico na interface elétrica.
Uma característica atraente é que a deformação mecânica nem sempre requer contato elétrico direto no ponto de medição. Isso pode melhorar a durabilidade e expandir as opções de design estrutural. Métodos magnéticos também podem suportar detecção multidirecional quando o campo magnético é intencionalmente moldado e medido em vários eixos.
Mesmo assim, esses sensores são menos comuns em plataformas robóticas convencionais. As razões vão além do desempenho da detecção.
Perturbação magnética externa, restrições de embalagem, dificuldade de calibração, histórico de padronização industrial limitado.
Todos esses fatores influenciam sua disseminação. Ainda assim, esta classe frequentemente recebe menos atenção do que merece. Quando dicas de força tridimensionais compactas são necessárias e as condições ambientais permanecem gerenciáveis, a detecção magnética pode oferecer uma rota equilibrada entre simplicidade estrutural e informações mais ricas. É o tipo de opção que pode não dominar as discussões à primeira vista, mas pode se tornar surpreendentemente convincente na aplicação correta.
Sensores Tácteis Piezoelétricos
Sensores tácteis piezoelétricos geram carga elétrica quando submetidos a estresse mecânico. Eles são especialmente eficazes para detecção de força dinâmica porque respondem rapidamente e podem produzir altas saídas de relação sinal-ruído durante eventos transitórios. Isso os torna bem adequados para detecção de impacto, detecção de vibração, eventos relacionados à textura e monitoramento de mudanças de contato rápidas.
Sua limitação é igualmente conhecida: eles geralmente não são bem adequados para medição de força estática porque a carga gerada tende a decair com o tempo. Como resultado, eles se destacam na detecção de mudança, mas não mantêm um valor constante com graça sob carga constante. Essa característica não enfraquece a tecnologia por padrão; ela simplesmente define onde o método atua com confiança e onde não atua.
Alguns dos designs mais fortes surgem quando essa natureza dinâmica é tratada como uma característica deliberada. Em sistemas de manipulação, elementos piezoelétricos são frequentemente mais eficazes quando emparelhados com outras modalidades de detecção. Eles podem capturar eventos rápidos que sensores mais lentos ou propensos a deriva podem perder. Nesse sentido, eles se encaixam naturalmente em arquiteturas tácteis híbridas, onde informações estáticas e dinâmicas são separadas em vez de serem forçadas em um único canal comprometido.
Direções de Engenharia Predominantes no Desenvolvimento de Sensores Tácteis
Trabalhos históricos e contemporâneos em todas essas categorias de sensores apontam para várias direções recorrentes.
Detecção Multidirecional
A detecção tátil moderna está se movendo além da simples detecção de força normal em direção à medição simultânea de força normal, força de cisalhamento, torque e movimento relacionado ao deslizamento.
Força normal, força de cisalhamento, torque, movimento relacionado ao deslizamento.
Esta mudança reflete uma compreensão mais profunda da manipulação. O contato real é intrinsecamente multidimensional. Um sensor que mede apenas um componente pode ainda ser útil, mas não pode descrever completamente como um objeto está sendo segurado, empurrado, torcido ou solto. À medida que as tarefas de manipulação se tornam mais ágeis, a deteção multidimensional parece menos uma refinação opcional e mais uma resposta natural à realidade física.
Maior Densidade de Array
Outra direção visível é o desenvolvimento de matrizes táteis mais densas. Uma maior densidade melhora a resolução espacial e permite que uma superfície sensora capture detalhes mais finos da distribuição de contato, localização de bordas, deformação local e pistas de textura.
Distribuição de contato, localização de bordas, deformação local, pistas de textura.
No entanto, uma maior densidade também aumenta a complexidade da fiação, as demandas de leitura, o risco de crosstalk e a carga de processamento de dados. Isso cria uma troca familiar na engenharia: mais dados não se tornam automaticamente informações mais úteis, a menos que a eletrônica e os algoritmos a montante estejam preparados para absorvê-los de forma eficiente. Qualquer pessoa que tenha trabalhado na integração de matrizes densas geralmente desenvolve sentimentos mistos aqui, porque o apelo de dados mais ricos muitas vezes chega juntamente com um aumento acentuado na carga do sistema.
Integração de Sistema Mais Rigorosa
Sensores táteis estão cada vez mais sendo projetados como partes de sistemas robóticos completos, em vez de como componentes isolados.
Conformidade mecânica, condicionamento de sinal, processamento embutido, política de controle, montagem estrutural.
Esses elementos agora estão mais estreitamente ligados. Isso reflete uma mudança mais ampla no julgamento da engenharia. Um sensor tátil ganha valor não apenas pela sensibilidade bruta, mas pela sua capacidade de melhorar o comportamento a nível de sistema. Muitos designs falham não porque o princípio de detecção é fraco, mas porque o sensor, controlador e estrutura mecânica foram desenvolvidos como se pertencessem a mundos separados. Essa desconexão é fácil de subestimar durante o desenvolvimento de conceitos e difícil de perdoar uma vez que o sistema atinge a operação plena.
Uma Perspectiva Fundamentada na Seleção de Sensores
Nenhum método de detecção tátil é universalmente superior. Cada tecnologia representa um equilíbrio diferente entre sensibilidade, robustez, resposta temporal, fabricabilidade, resolução espacial e carga de integração. A escolha mais adequada depende da tarefa alvo, do ambiente operacional e da arquitetura de controle circundante.
• Para detecção distribuída de baixo custo em grandes áreas, abordagens piezorresistivas continuam sendo altamente atraentes.
• Para imagem de contato de alta resolução, métodos ópticos frequentemente proporcionam maior poder expressivo.
• Para medição de toque estático leve e sensível, sensores capacitivos continuam sendo atraentes quando a interferência é controlada.
• Para detecção de eventos dinâmicos, a detecção piezoelétrica mantém uma clara vantagem.
• Para detecção multidimensional compacta em condições bem geridas, abordagens magnéticas oferecem opções promissoras.
Um princípio de seleção prático é escolher o método de detecção de acordo com o modo de falha que mais importa. Se a principal preocupação é a falta de contato estático pequeno, uma classe de sensores se destacará. Se a principal preocupação é a falha em detectar deslizamentos ou impactos rápidos, outra classe fará mais sentido. Essa perspectiva muitas vezes leva a melhores resultados de design do que selecionar um sensor apenas pela sensibilidade máxima ou pela popularidade na pesquisa publicada. Ela pede uma conversa mais honesta com a aplicação, e essa honestidade geralmente compensa.
A classificação de sensores táteis não é meramente um exercício de nomeação de categorias. Ela expressa a relação entre contato físico, geração de sinal e função robótica. A classificação funcional explica que tipo de informação de contato está sendo buscada. A classificação baseada em transdução explica como essa informação é fisicamente obtida e quais compromissos técnicos a acompanham.
A direção mais ampla do campo sugere que sistemas táteis futuros dependerão menos do desempenho isolado do sensor e mais de estratégias de detecção integradas.
Múltiplos mecanismos, percepção espacial densa, compatibilidade direta com sistemas de controle.
Dentro desse contexto, o sensor tátil mais eficaz geralmente não é aquele com a especificação independente mais impressionante, mas sim aquele que preserva a inteligência de contato confiável em condições operacionais reais. Essa conclusão pode parecer contida, mas continua a separar conceitos polidos de sistemas que os engenheiros podem confiar quando o trabalho deixa de ser teórico.
Aplicações de Sensores Táteis
Os sensores táteis progrediram muito além da detecção básica de pressão e agora suportam uma gama mais ampla de funções avançadas em próteses, automação industrial e eletrônica vestível. A sua contribuição não se limita à identificação de contato. Eles convertem a interação física em informações que podem ser interpretadas com consistência, agido com confiança e alinhadas com as exigências das condições operacionais reais. Em sistemas aplicados, seu valor prático surge quando sinais brutos são traduzidos em julgamentos acionáveis.
• Quão firmemente apertar
• Quando parar o movimento
• Como distinguir contato seguro de força nociva
• Como retornar um feedback significativo ao usuário
Como resultado, o campo não é mais moldado apenas pela sensibilidade. Agora é cada vez mais direcionado pela interpretação de sinais, compatibilidade mecânica e integração em nível de sistema.
Sensores Tácteis em Sistemas Protéticos
Na tecnologia prostética, os sensores táteis são solicitados a fazer muito mais do que registrar a força externa. O objetivo mais profundo é recriar uma forma de toque que o corpo humano possa interpretar com menos esforço e maior clareza intuitiva. A pele natural não descreve o contato através de um único valor ininterrupto. Depende de mecanorreceptores especializados que transformam pressão, vibração e textura em atividade neural baseada em pulsos. O tempo e a frequência desses pulsos transportam informações em camadas.
• Forma do objeto
• Maciez
• Deslizamento
• Magnitude da força
Este princípio biológico influenciou constantemente a arquitetura dos sistemas de sensores prostéticos avançados.
Sensores táteis artificial tradicionais frequentemente produzem mudanças de tensão analógica ou resistência. Embora tais saídas permaneçam úteis para medição, não alinham naturalmente com o estilo de sinalização orientado por eventos do sistema nervoso. Portanto, computação adicional é necessária para converter saídas contínuas em padrões semelhantes a picos adequados para estimulação neural ou controle biomimético. Esta etapa de tradução muitas vezes decide se o feedback é percebido como acessível ou mentalmente cansativo para o usuário. Um sistema pode operar com precisão impressionante no laboratório, mas ainda assim parecer desconfortável no uso diário, se seu feedback chegar tarde, flutuar inesperadamente ou reduzir a sensação a sinais simplificados.
Codificação Neuromórfica e Naturalidade Sensorial
A codificação neuromórfica emergiu como uma direção proeminente porque tenta diminuir a distância entre a percepção artificial e a comunicação biológica. Em vez de se concentrar apenas na magnitude do sinal, as estratégias neuromórficas enfatizam a estrutura temporal, a geração de eventos esparsos e a codificação adaptativa. Esta abordagem pode reduzir a carga de dados, encurtar o tempo de resposta e produzir padrões de feedback que parecem mais próximos do toque natural. Uma lição de design prática tornou-se cada vez mais clara: a naturalidade muitas vezes depende menos da maximização da complexidade e mais da preservação de transições significativas.
• Primeiro contato
• Aumento de carga
• Início do deslizamento
Durante tarefas de manipulação reais, essas transições geralmente carregam mais valor operacional do que valores de força estáticos sozinhos.
A experiência de uso de próteses mostrou repetidamente que os usuários frequentemente preferem feedback que é estável e previsível em vez de feedback que é teoricamente mais rico, mas mais difícil de interpretar. Alguém tentando segurar um copo de papel, abotoar uma camisa ou levantar um objeto frágil ganha pouco com detalhes excessivos se esses detalhes chegarem de forma inconsistente. O que se mostra realmente útil é a informação oportuna que reduz a chance de esmagar, deixar cair ou ajustar repetidamente a pegada. Por essa razão, muitos designs bem-sucedidos enfatizam a codificação de baixa latência, limiares de força calibrados e sinais sensoriais repetíveis.
Interfaces Flexíveis e Integração Neural
Materiais flexíveis e interfaces suaves são amplamente utilizados porque os sistemas protéticos devem interagir com superfícies curvas, articulações móveis e tecidos biológicos sensíveis. Plataformas de sensores rígidas podem oferecer precisão, mas muitas vezes trazem desconforto, concentração de estresse localizada e conformidade fraca a longo prazo. Camadas táteis flexíveis, elastômeros condutivos e interconexões extensíveis melhoram o ajuste mecânico e permitem que superfícies sensoriais permaneçam funcionais durante a flexão e deformação repetida. Essa compatibilidade mecânica afeta não apenas o conforto, mas também a confiabilidade do sinal e a vida útil.
Interfaces neurais diretas introduzem outra camada de complexidade. Uma vez que a saída do sensor é destinada a nervos periféricos, vias espinhais ou sistemas corticais, os engenheiros devem atender a várias demandas intimamente acopladas.
• Temporização precisa
• Estimulação segura
• Estabilidade da interface a longo prazo
O desafio é, portanto, duplo. O sensor deve detectar eventos externos com precisão, e a interface deve entregar esses eventos de uma forma que o utilizador possa aprender gradualmente e confiar. Na prática, a confiança cresce quando o feedback permanece consistente ao longo de tarefas repetidas. Mesmo uma interface tecnicamente sofisticada pode ser deixada de lado se as suas respostas mudarem significativamente com suor, movimento do soquete ou desgaste mecânico rotineiro.
Barreiras Remanescentes na Adoção de Próteses
Apesar dos progressos substanciais, várias barreiras ainda ralentizam a adoção mais ampla.
• Biocompatibilidade a longo prazo
• Eficiência energética
• Deriva do sinal
• Calibração individualizada
Outro problema persistente é que o toque protético é frequentemente avaliado em condições de teste controladas que não refletem totalmente a vida diária. O sucesso em laboratório com objetos padrão não se estende automaticamente a superfícies molhadas, temperaturas variáveis ou movimentos rápidos e não planejados. Uma estratégia de desenvolvimento mais madura deve incluir diversidade de tarefas do mundo real desde o início, em vez de tratar isso como algo a ser examinado apenas no final.
Sensores Tácteis em Automação Industrial
Na automação industrial, a sensibilidade tátil fortalece o desempenho robótico ao adicionar consciência física no pulso, garra ou efetuador final. Esta camada adicional de percepção permite que as máquinas façam mais do que seguir trajetórias geométricas. Elas podem responder a condições de contato real, ajustar a força durante a montagem, detectar obstáculos inesperados e manusear partes delicadas com maior precisão. À medida que os ambientes de produção se tornam mais rápidos e variáveis, a sensibilidade tátil é cada vez mais tratada como parte de uma base de engenharia robusta, em vez de uma melhoria opcional.
Uma ampla gama de tarefas industriais beneficia do feedback tátil.
• Montagem robótica
• Inserção
• Polimento
• Aperto
• Inspeção de superfície
Em tarefas de inserção, por exemplo, a visão pode fornecer alinhamento aproximado, mas o sucesso final depende frequentemente de mudanças sutis na força que revelam a direção do contato, atrito ou bloqueio. No polimento ou desbaste, manter uma pressão de contato adequada molda diretamente a qualidade da superfície e a longevidade da ferramenta. Em aperto, a sensibilidade tátil ajuda a detectar deslizamentos incipientes antes que um objeto seja perdido. Esses exemplos mostram que o toque complementa a visão ao fornecer realidade física local onde as informações de linha de visão permanecem incompletas ou ambíguas.
Controle em Malha Fechada e Inteligência de Contato
Uma das contribuições mais claras da sensibilidade tátil na automação reside no controle em malha fechada. Uma vez que informações de força e contato estão disponíveis em tempo real, os robôs podem ajustar rigidez, velocidade e trajetória de acordo com o estado da tarefa. Isso apoia o ajuste de conformidade, a detecção de colisões e a manipulação adaptativa. O efeito mais amplo é que a sensibilidade tátil transforma um robô de executor pré-programado em um sistema fisicamente responsivo.
Um padrão revelador de configurações de implementação é que muitas falhas de contato não decorrem de força insuficiente do robô ou planejamento geométrico inadequado, mas da falta de feedback local. Uma garra pode aplicar uma força inadequada não porque o controlador carece de capacidade, mas porque não tem indicação confiável de mudança de atrito, desalinhamento de peça ou deformação de superfície. Nessas situações, mesmo uma camada tátil modesta pode melhorar o desempenho de forma mais perceptível do que um atuador mais forte. Isso sugere que o manuseio de contato mais inteligente frequentemente começa com uma melhor detecção antes que mecânicas mais agressivas sejam consideradas.
Segurança e Interação Homem-Robô
Na manufatura colaborativa, a sensibilidade tátil também melhora a segurança. Robôs que detectam contato inesperado rapidamente estão melhor posicionados para limitar a força de impacto, parar o movimento ou mudar para um comportamento de conformidade. Isso torna-se especialmente relevante em espaços de trabalho compartilhados onde operadores e máquinas trabalham em estreita proximidade. A segurança nesse cenário vai além das paradas de emergência. Inclui também a redução de quase colisões, limitação de colisões menores e a possibilidade de uma cooperação mais suave durante a entrega ou montagem assistida.
Do ponto de vista da engenharia, a dificuldade reside em equilibrar sensibilidade com robustez. Os sensores devem detectar contato significativo sem disparar alarmes falsos constantes devido a vibração, ruído da ferramenta ou variação normal do processo. Em linhas de produção reais, sistemas excessivamente sensíveis podem tornar-se frustrantemente impraticáveis porque interrompem o fluxo de trabalho e erodem a confiança do operador. É por isso que sistemas táteis industriais eficazes geralmente combinam lógica de limiar, filtragem e interpretação específica da tarefa, em vez de depender apenas da saída bruta do sensor.
Escalabilidade e Restrições em Ambientes Hostis
Ambientes industriais impõem exigências rigorosas em termos de durabilidade, estabilidade de calibração e custo de manutenção.
• Poeira
• Óleo
• Variação de temperatura
• Impactos repetidos
• Ruído eletromagnético
Estes fatores podem degradar gradualmente ou abruptamente o desempenho do sensor. Um sensor que se comporta bem em uma plataforma de pesquisa limpa pode ter dificuldades em uma célula de fabricação de alto ciclo. Por essa razão, a adoção industrial depende não apenas da capacidade de detecção, mas também do empacotamento, vedação, substituibilidade e transparência diagnóstica.
A escalabilidade apresenta outro desafio. Um array tátil de alta resolução pode fornecer dados excelentes, no entanto, sua apelo prático diminui se a manutenção for cara ou se a integração com controladores existentes se tornar trabalhosa. Em muitas instalações, a solução preferida não é aquela com a saída de dados mais rica, mas a que continua operando com mínima recalibração e menos surpresas. A confiabilidade em condições imperfeitas continua sendo um dos sinais mais persuasivos de maturidade em engenharia.
Sensores Tácteis em Eletrônicos Vestíveis
Em eletrônicos vestíveis, os sensores tácteis operam como camadas de detecção distribuídas que monitoram força, temperatura, umidade, movimento e outros sinais ambientais ou fisiológicos. Seu papel está se expandindo de simples coleta de dados para interação sustentada entre o corpo, o dispositivo e o ambiente circundante. Isso posicionou a detecção tátil como um componente importante da pele eletrônica, roupas inteligentes, dispositivos de reabilitação e plataformas de monitoramento de saúde.
O desenvolvimento de substratos flexíveis e circuitos esticáveis melhorou substancialmente o conforto e a adaptabilidade dos sistemas vestíveis. Várias classes de materiais são frequentemente utilizadas porque combinam funcionalidade elétrica com conformidade mecânica.
• Grafeno
• Nanotubos de carbono
• Óxido de zinco
• Polímeros condutivos
• Metais líquidos
Esses materiais permitem que os sensores se curvem, estiquem e se conformem a superfícies irregulares enquanto mantêm a sensibilidade e a continuidade do sinal. A adaptabilidade mecânica é muito importante porque um dispositivo vestível deve funcionar sob deformação constante, em vez de sob condições laboratoriais estáticas e cuidadosamente controladas.
Inovação em Materiais e Expansão Funcional
A inovação em materiais expandiu a detecção tátil de detecção de um único parâmetro para percepção multimodal. Dispositivos vestíveis modernos visam cada vez mais detectar vários tipos de sinais dentro de uma plataforma integrada.
• Pressão
• Deformação
• Calor
• Umidade
• Mudanças bioquímicas
Isso permite uma interpretação mais rica da condição e do ambiente do usuário. Por exemplo, dados de pressão sozinhos podem indicar contato, enquanto pressão combinada com temperatura e umidade pode ajudar a distinguir exercício, estresse, exposição ambiental ou má adaptação na interface.
No entanto, a detecção multimodal também introduz nova complexidade. À medida que mais canais de detecção são adicionados, a interferência entre sinais torna-se uma preocupação séria. Uma mudança de temperatura pode alterar um sinal de pressão, e a deformação mecânica pode perturbar caminhos elétricos destinados à detecção de umidade. Isso significa que adicionar funções não melhora automaticamente o design. Em muitos casos, a qualidade do design é julgada pela forma limpa como diferentes modalidades são isoladas, calibradas e fundidas.
Integração em Nível de Sistema em Plataformas Vestíveis
O design atual de vestíveis está cada vez mais centrado na integração de todo o sistema. Sensores agora são combinados com unidades funcionais adicionais.
• Módulos de potência
• Unidades de comunicação sem fio
• Circuitos de processamento de sinal
• Microatuadores para saída tátil ou resposta terapêutica
Essa mudança reflete uma verdade prática: um sensor sozinho não produz um sistema vestível que as pessoas continuarão a usar. O verdadeiro valor aparece apenas quando detecção, computação, transmissão e feedback operam como uma plataforma coordenada.
No uso real, problemas de integração frequentemente surgem antes dos limites de detecção. Um dispositivo pode mostrar excelente sensibilidade, mas ainda assim se tornar inconveniente devido ao volume da bateria, transferência sem fio instável, irritação da pele ou perda de sinal durante o movimento. Por essa razão, os designs vestíveis mais convincentes frequentemente mostram contenção. Eles buscam desempenho equilibrado, operação de baixo consumo e conforto mecânico, em vez de perseguir métricas isoladas de pico. Um dispositivo que as pessoas estão genuinamente dispostas a usar todos os dias muitas vezes supera um tecnicamente superior que acaba esquecido em uma gaveta.
Durabilidade e Desafios de Uso a Longo Prazo
Dobramentos repetidos, torções, suor e exposição a variações de temperatura criam estresse cumulativo em sistemas vestíveis. A fadiga do material pode levar a vários caminhos de degradação.
• Microfissuras
• Delaminação
• Perda de condutividade
• Deriva de calibração
Além disso, a discrepância entre as propriedades térmicas, mecânicas e elétricas em materiais em camadas pode produzir instabilidade a longo prazo. Esses modos de falha são especialmente difíceis porque podem permanecer ocultos durante ciclos de teste curtos, no entanto, eles muitas vezes determinam a vida útil real do produto.
O desempenho a longo prazo deve, portanto, ser tratado como um objetivo de design inicial em vez de um item de verificação na fase final. Dispositivos destinados ao uso diário requerem mais do que uma sensibilidade inicial promissora. Eles se beneficiam de testes de fadiga acelerados, avaliação de adesão, estratégias de encapsulamento e algoritmos de compensação de deriva. Na prática, a durabilidade muitas vezes separa um protótipo atraente de um produto que pode permanecer em serviço com menos compromissos.
Desafios Transversais e Direções Futuras
Embora próteses, automação e dispositivos vestíveis diferem em objetivos de aplicação, eles compartilham vários desafios fundamentais.
• Melhorar a fidelidade do sinal
• Reduzir o ruído e a interferência
• Aumentar a durabilidade mecânica
• Reduzir o consumo de energia
• Alcançar uma integração mais estreita entre detecção e tomada de decisão
Em todas as três áreas, o campo está avançando para plataformas que são menores, mais inteligentes, mais macias e mais autônomas.
Uma tendência notável é a mudança de detecção passiva para percepção ativa. Sistemas táteis futuros não apenas registrarão pressão. Eles interpretarão contextos, anteciparão resultados de interação e adaptarão comportamentos em tempo real. Isso pode envolver várias capacidades emergentes.
• Computação de borda local
• Auto-calibração
• Aproveitamento de energia
• Comunicação orientada a eventos
Os avanços com a influência mais ampla provavelmente virão de arquiteturas que encurtam a distância entre detecção, processamento e resposta.
Outra direção importante é a operação auto-sustentável. À medida que os dispositivos táteis se tornam mais distribuídos e móveis, a dependência de recargas frequentes ou unidades de energia volumosas se torna uma limitação cada vez mais séria. Eletrônicos energeticamente eficientes, armazenamento flexível, aproveitamento triboelétrico e circuitos neuromórficos de baixo consumo de energia provavelmente desempenharão um papel maior. Uma plataforma tátil torna-se muito mais prática uma vez que pode permanecer confiável sem exigir atenção constante do usuário.
A próxima grande descoberta provavelmente não virá apenas da sensibilidade, porque muitos sensores já oferecem sensibilidade suficiente para demonstrações controladas. O ponto de virada mais significativo chegará quando sistemas táteis unirem detecção de alta qualidade com durabilidade, interpretabilidade e integração perfeita nas tarefas do dia a dia. O campo está se aproximando de um estágio em que o sucesso será julgado menos pela medição do toque e mais pelo uso do toque de forma natural, contínua e em escala.
Conclusão
Sensores táteis preenchem a lacuna entre contato físico e inteligência de máquina, convertendo interações relacionadas ao toque em informações significativas. A detecção tátil eficaz depende não apenas da sensibilidade, mas também da estabilidade do sinal, calibração e interpretação confiável em condições reais de operação. À medida que a robótica, a automação e os sistemas inteligentes continuam a avançar, os sensores táteis permanecerão essenciais para melhorar o manuseio de objetos, a consciência ambiental e a interação segura entre humanos e máquinas.
Perguntas Frequentes [FAQ]
1. Por que o reconhecimento tátil é frequentemente mais difícil do que a detecção tátil em sistemas robóticos?
A detecção tátil foca na medição de informações de contato físico, como força, pressão, localização ou deslizamento. O reconhecimento é mais desafiador porque deve interpretar essas medições para determinar propriedades do objeto, forma, dureza ou condição de aperto. A precisão do reconhecimento depende fortemente da qualidade dos dados de detecção, tornando-o mais sensível a ruído, deriva e condições de contato variáveis.
2. Por que o desenvolvimento de sensores táteis mudou de melhoria de hardware para algoritmos de processamento de sinal e percepção?
À medida que a tecnologia de sensores amadureceu, os pesquisadores perceberam que os sinais táteis brutos sozinhos fornecem um valor limitado. Informações úteis surgem apenas após calibração, filtragem, extração de características e interpretação. Essa mudança levou a uma ênfase maior no processamento de dados, permitindo que robôs identifiquem superfícies, detectem deslizamento, estimem propriedades de objetos e tomem decisões de controle inteligentes, em vez de simplesmente medir a força.
3. Como os sensores de deslizamento melhoram o desempenho de agarramento dos robôs em comparação com sensores de força apenas?
Sensores de força podem medir quanta força é aplicada a um objeto, mas nem sempre indicam se o objeto está começando a mover-se. Sensores de deslizamento detectam movimento relativo na superfície de contacto e podem identificar micro-deslizamentos antes que um objeto seja deixado cair. Este aviso antecipado permite que o sistema de controlo ajuste a força de agarre em tempo real e mantenha um aperto estável.
4. Por que não existe uma única tecnologia de sensor tátil que funcione melhor para cada aplicação?
Cada método de sensor envolve diferentes trade-offs. Sensores piezorresistivos são econômicos e fáceis de integrar, sensores capacitivos oferecem alta sensibilidade, sensores ópticos fornecem informações espaciais detalhadas, sensores piezoelétricos destacam-se na deteção de eventos dinâmicos, e sensores magnéticos suportam percepção multidirecional. A melhor escolha depende de fatores como requisitos de sensibilidade, condições ambientais, durabilidade, custo e necessidades de integração do sistema.
5. Quais fatores estão a impulsionar o desenvolvimento futuro da tecnologia de sensores táteis?
Espera-se que os futuros sistemas táteis se concentrem na detecção multidirecional, matrizes de sensores de maior resolução, integração mais apertada com sistemas de controlo e interpretação de sinais mais inteligente. Desenvolvimentos emergentes, como computação de borda, autocallibração, captação de energia e processamento neuromórfico, visam criar plataformas táteis que podem operar de forma mais confiável, eficiente e autônoma em ambientes do mundo real.
Blog relacionado
-
Folha de dados, circuito, equivalente, pinagem
![Folha de dados, circuito, equivalente, pinagem]()
28/08/2024
O IRLZ44N é um MOSFET de potência n amplamente utilizado.Reconhecido por seus excelentes recursos de comutação, é altamente adequado para inúmer... -
Quantos zeros em um milhão, bilhões, trilhões?
![Quantos zeros em um milhão, bilhões, trilhões?]()
29/07/2024
Milhões representam 106, uma figura facilmente agressável quando comparada aos itens cotidianos ou salários anuais. Bilhão, equivalente a 109, com... -
Temperatura da bateria muito baixa, o carregamento parou.Como consertar isso?
![Temperatura da bateria muito baixa, o carregamento parou.Como consertar isso?]()
06/10/2024
Os problemas de carregamento da bateria do telefone celular são comuns, mas podem ser efetivamente gerenciados.A temperatura desempenha um grande pap... -
Guia abrangente do transistor BC547
![Guia abrangente do transistor BC547]()
04/07/2024
O transistor BC547 é comumente usado em uma variedade de aplicações eletrônicas, variando de amplificadores de sinal básicos a circuitos complexo... -
Um guia completo para os multiplexadores e seu papel nos sistemas digitais
![Um guia completo para os multiplexadores e seu papel nos sistemas digitais]()
20/09/2025
Os multiplexadores são componentes em sistemas digitais, projetados para canalizar vários sinais de entrada em uma única linha de saída usando ló... -
Guia abrangente do SCR (retificador controlado por silício)
![Guia abrangente do SCR (retificador controlado por silício)]()
22/04/2024
Retificadores controlados por silício (SCR), ou tiristores, desempenham um papel fundamental na tecnologia de eletrônicos de energia devido ao seu d... -
CR2450 vs CR2032 Comparação: Tudo o que você precisa saber
![CR2450 vs CR2032 Comparação: Tudo o que você precisa saber]()
15/09/2025
As baterias de botão como CR2450 e CR2032 alimentam muitos eletrônicos diários, desde relógios e controles remotos a dispositivos médicos e indus... -
LR621, SR621SW, 364, equivalentes de bateria AG1 e substituições
![LR621, SR621SW, 364, equivalentes de bateria AG1 e substituições]()
15/07/2024
As baterias de botão LR621 e SR621SW são predominantes em dispositivos eletrônicos compactos, como relógios, pequenos brinquedos, calculadoras e c... -
Fundamentos de circuitos de amplificadores operacionais
![Fundamentos de circuitos de amplificadores operacionais]()
28/12/2023
No mundo intrincado da eletrônica, uma jornada para seus mistérios invariavelmente nos leva a um caleidoscópio de componentes do circuito, requinta... -
Comparando diferenças e aplicações de NMOs e PMOs
![Comparando diferenças e aplicações de NMOs e PMOs]()
15/11/2024
Compreender as diferenças entre os transistores de NMOs e PMOs é importante no projeto de circuitos eficientes.NMOs (NMOS (PMOs (PMOs (Metal-óxido-...




Peças quentes
- ICS9169CJ-272
- LT1161ISW#PBF
- ND3260-GE
- N87C196KC20
- LC89587-UK1-E
- NC7WZ14EP6X
- AD5827BCBZ-REEL7
- K6X4016T3F-TF55
- KSA1298OMTF
- RT0805DRD07432KL
- X93156UM8IZ-2.7
- BA12003BF-E2
- EX128-TQG100I
- IR2156STR
- SPCA716A-PL111
- SKM400GA125D
- M6MGA157F4G-MWG-P
- STTH3R06S
- C1608X6S0J335M080AB
- TLS2258GQMR
- MSC1211Y4PAGT
- TPS65263RHBT
- FQB55N10TM
- AV8112-P1
- POWR1208-01TN44E
- CC1812KKX7RDBB152
- AB3100P1F
- GRM0225C1E9R2WA03L
- TEC495V3
- MAX9638AVB+T
- DS2065W-100
- CM01H900T/LRCM01H900T
- G2998P81U
- HMC316MS8TR
- CYUSB3065-BZXC
- LT1004CZ-2.5
- T491A334M035AT2478
- DM9331AEP
- LT3650EDD-8.4
- MAX9323EUP
- S3F80KBX4H-QZ8B
- BQ2058SN
- COPC822-FHM/WM
- IS42S16800B-6TLI
- TE28F320C3BA70
- R5F71242D50FPV
- AD2S1210WBSTZ
- XLS416XD0800
- BCM54881B1KFBG
- ORICO-M2P2-C3-C